Innerhalb von Deutschland wurden zuletzt 3,1 Milliarden Tonnen pro Jahr an Gütern mit dem Lkw transportiert – mehr als 85 Prozent aller Güter. Das immense Transportaufkommen lässt sich nur bewältigen, wenn ein Rad ins andere greift. Auch die Hoflogistik leistet hier einen wichtigen Beitrag. Bei der Verladung von Waren besteht allerdings durchaus Optimierungsbedarf: Immer wieder kommt es zu Fehlbeladungen, wenn Lkw nicht auf der korrekten Stellfläche stehen. Diese fallen unter Umständen erst beim Warenempfänger auf – eine kostspielige Ineffizienz. »Zwar bieten herkömmliche Yard-Management-Systeme, wie sie heute bei den meisten größeren Logistikhäfen eingesetzt werden, die Möglichkeit, den täglichen LKW-Verkehr in der Hoflogistik zu orchestrieren. Doch ein Echtzeitabgleich mit realen Daten zur Stellplatzbelegung findet in der Regel nicht statt: Man weiß also nicht, ob das richtige Fahrzeug zur richtigen Zeit am richtigen Tor steht«, so Julian Hinxlage vom Fraunhofer IML, Product Owner von »Yard Lense on Edge«. In dem Silicon Economy-Projekt entwickeln die Forschenden jetzt ein kamerabasiertes System, mit dem Unternehmen Asset- und Lkw-Positionen im Außenbereich von Betriebsgeländen in Echtzeit kontrollieren können. Die Entwicklung ist jetzt im »real life« angekommen – an einem Logistikstandort von Dachser in Dortmund.
Wie können ineffiziente Prozesse in der Hoflogistik verbessert werden?
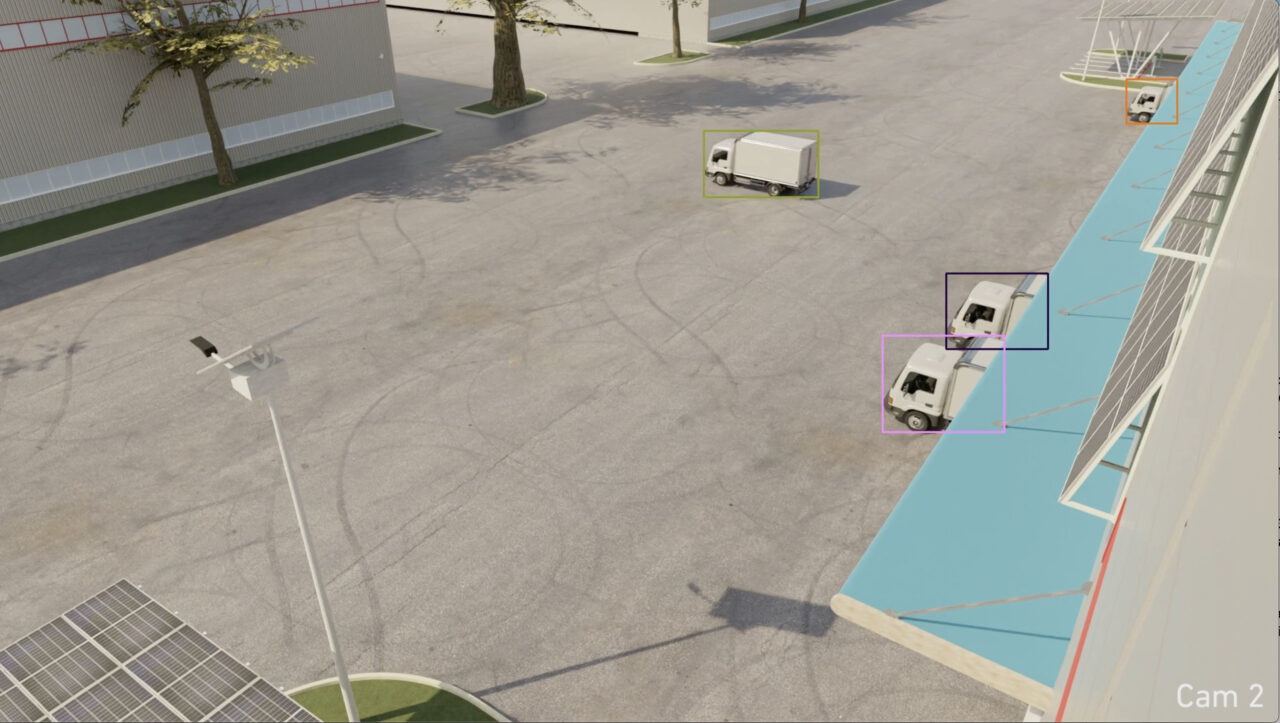
Vor Ort haben die Forschenden drei smarte Kameras installiert, die die Zufahrt und 30 Tore in zwei Abschnitten überwachen. Die kompakten, witterungsbeständigen Kameras sind an erhöhten Anbringungspunkten befestigt, unter anderem auf dem Dach einer Lkw-Waschanlage. Die Geräte laufen nicht 24/7, sondern zu den wichtigen Stoßzeiten. Sie nehmen dann untereinander synchronisiert Videos von fünf Minuten mit 20 Bildern pro Sekunde auf. Mit den Bilddaten trainieren die Forschenden derzeit ihre Algorithmen.
Die Technik, die für das System angewendet wird, nennt sich »Multi-View Multi-Object Tracking«. Diese Art der Bildverarbeitung ermöglicht es, mehrere Objekte in einer Szene mit mehreren verfügbaren Perspektiven über die Zeit hinweg zu verfolgen und ihre Bewegungen zu analysieren. Das Tracking von Objekten in einem Bild ist bereits eine komplexe Herausforderung. Das Tracking von mehreren Objekten gleichzeitig, die zudem noch über verschiedene Kameras erfasst werden, ist es erst recht. Bei Dachser ist es zudem in bestimmten Situationen schwierig, die Fahrzeuge zu unterscheiden, da sie alle sehr ähnlich aussehen. Einfacher wird es künftig auf Yards, auf den unterschiedliche Transportdienstleister unterwegs sind und damit unterschiedliche Lkw-Typen erfasst werden können. Anwendungsgebiete für das »Multi-View Multi-Object Tracking« sind das autonome Fahren, die Robotik – oder eben die Erfassung von Aktivitäten auf Betriebshöfen.
Inwiefern ist ein »Digitaler Zwilling« einem herkömmlichen Yard-Management-System überlegen?
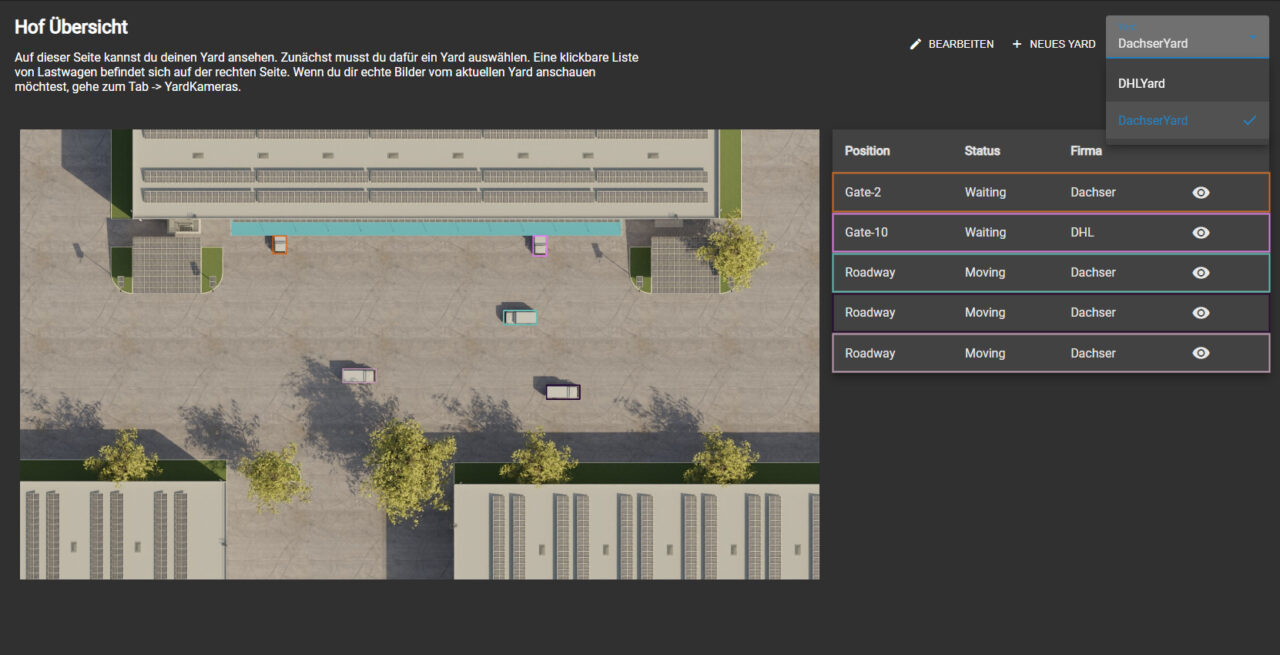
Das im Projekt »Yard Lense on Edge« entwickelte System ist in der Lage, LKW und entsprechende Ladeeinheiten wie Wechselbrücken separat voneinander zu erkennen und im Bild zu verfolgen. Mit einer einmaligen Identifikation in einer beliebigen Situation können den beobachteten Objekten Identitäten gegeben werden. Das System erkennt zuverlässig die Abstellplätze von Fahrzeugen und Wechselbrücken und kann zukünftig dem LKW-Fahrer den besten Weg zu seinem Ziel zeigen und ihm Feedback geben, ob er korrekt steht. Die Plandaten zum Abgleich können entweder aus dem vorhandenen Yard-Management-System stammen oder in die Webplattform eingegeben bzw. importiert werden. Die Plattform ermöglicht auch die grafische Erstellung eines Hoflayouts mit Stellflächen und Toren. Abschließend wird durch Yard Lense on Edge ein vollständiger Digitaler Zwilling für den Hof erzeugt.
Können Unternehmen ihren Yard auch selbst konfigurieren?
Die Lösung setzt auf den Entwicklungen aus zwei bereits abgeschlossenen Silicon Economy-Projekten – »Yard Lense« und »CV on Edge« – auf und nutzt Komponenten aus beiden Projekten. So ermöglicht der Guided Training Service aus dem Projekt »CV on Edge« auch Beteiligten ohne Machine-Learning-Erfahrung einen Algorithmus für die Detektion der Fahrzeuge auf dem eigenen Yard anzulernen.
»Im Ergebnis wird ein Dienst entstehen, mit dem Unternehmen einen digitalen Zwilling ihres Yards und der entsprechenden Stellflächen erzeugen können. Der aktuelle Status auf dem Hof wird in dem System kontinuierlich abgebildet und kann jederzeit eingesehen werden.« Tim Chilla, Mitglied im Team von »Yard Lense on Edge«: »Die Zeiten, in denen Lkw und Ladungen – trotz eines funktionierenden Yard-Management-Systems – zur Sicherheit noch mal händisch auf großen Tafeln hin- und hergeschoben werden, sind dann endgültig vorbei.«
Die Komponenten von »Yard Lense on Edge« werden nach Abschluss des Projekts auch als Open Source veröffentlicht. »Wir bauen keine proprietäre Lösung, sondern sorgen vielmehr dafür, dass viele unterschiedliche Fälle antizipiert werden«, so Julian Hinxlage. Mit unserem synthetischen (künstlich erzeugten, digitalen) Datensatz und der Software und Anleitung zur Generierung weiterer Szenarien haben Unternehmen die Möglichkeit, ihren eigenen Yard zu konfigurieren – ob auf der Basis echter oder künstlich erzeugter Daten.
Unternehmen, die als Anforderungsgeber einen Beitrag im Projekt leisten wollen oder sich für eine spätere Implementierung des Diensts interessieren, sind herzlich willkommen.




